D3Net: A Unified Speaker-Listener Architecture for 3D Dense Captioning and Visual Grounding
Dave Zhenyu Chen1 Qirui Wu2 Matthias Nießner1 Angel X. Chang2
1Technical University of Munich 2Simon Fraser University
Introduction
Recent studies on dense captioning and visual grounding in 3D have achieved impressive results. Despite developments in both areas, the limited amount of available 3D vision-language data causes overfitting issues for 3D visual grounding and 3D dense captioning methods. Also, how to discriminatively describe objects in complex 3D environments is not fully studied yet. To address these challenges, we present D3Net, an end-to-end neural speaker-listener architecture that can detect, describe and discriminate. Our D3Net unifies dense captioning and visual grounding in 3D in a self-critical manner. This self-critical property of D3Net also introduces discriminability during object caption generation and enables semi-supervised training on ScanNet data with partially annotated descriptions. Our method outperforms SOTA methods in both tasks on the ScanRefer dataset, surpassing the SOTA 3D dense captioning method by a significant margin.
Video
Results
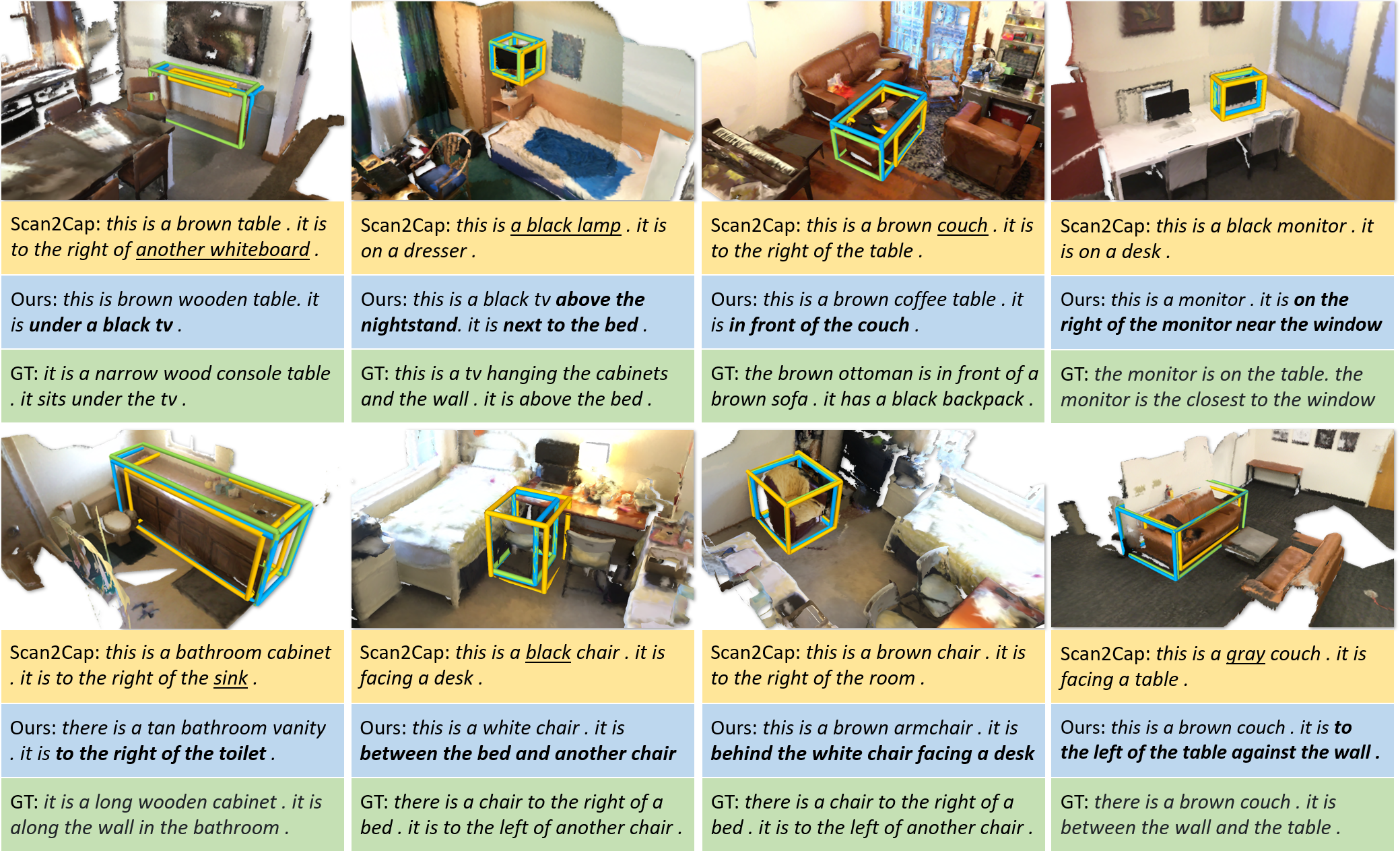
Qualitative results in 3D dense captioning task from Scan2Cap and our method. We underline the inaccurate words and mark the spatially discriminative phrases in bold. Our method qualitatively outperforms Scan2Cap in producing better object bounding boxes and more discriminative descriptions.
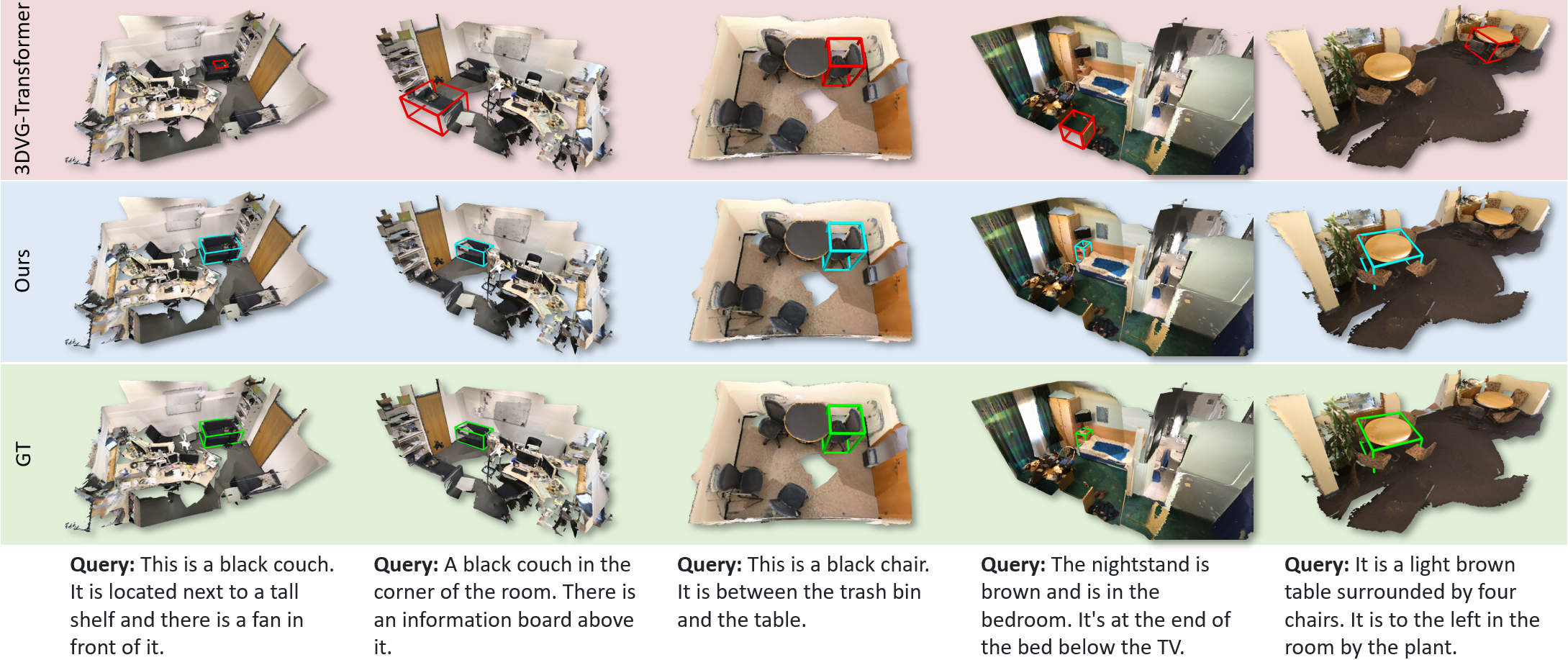
3D visual grounding results using 3DVG-Transformer and our method. 3DVG-Transformer fails to accurately predict object bounding boxes, while our method produces accurate bounding boxes and correctly distinguishes target objects from distractors.
Publication
Paper | arXiv | Code
If you find our project useful, please consider citing us:
@misc{chen2021d3net,
title={D3Net: A Speaker-Listener Architecture for Semi-supervised Dense Captioning and Visual Grounding in RGB-D Scans},
author={Dave Zhenyu Chen and Qirui Wu and Matthias Nießner and Angel X. Chang},
year={2021},
eprint={2112.01551},
archivePrefix={arXiv},
primaryClass={cs.CV}
}